|
Just to keep the terminology straight so I'm not misunderstanding what your question refers to, sonar sensors are protected by fairings, (these protrude from the exterior) windows, which usually conform to the exterior, and domes, which cover the entire bow (--that's why they're dome-shaped.) Chin mounts, (on older, and now VA-class boats) are attached to the lower portion of the bow.
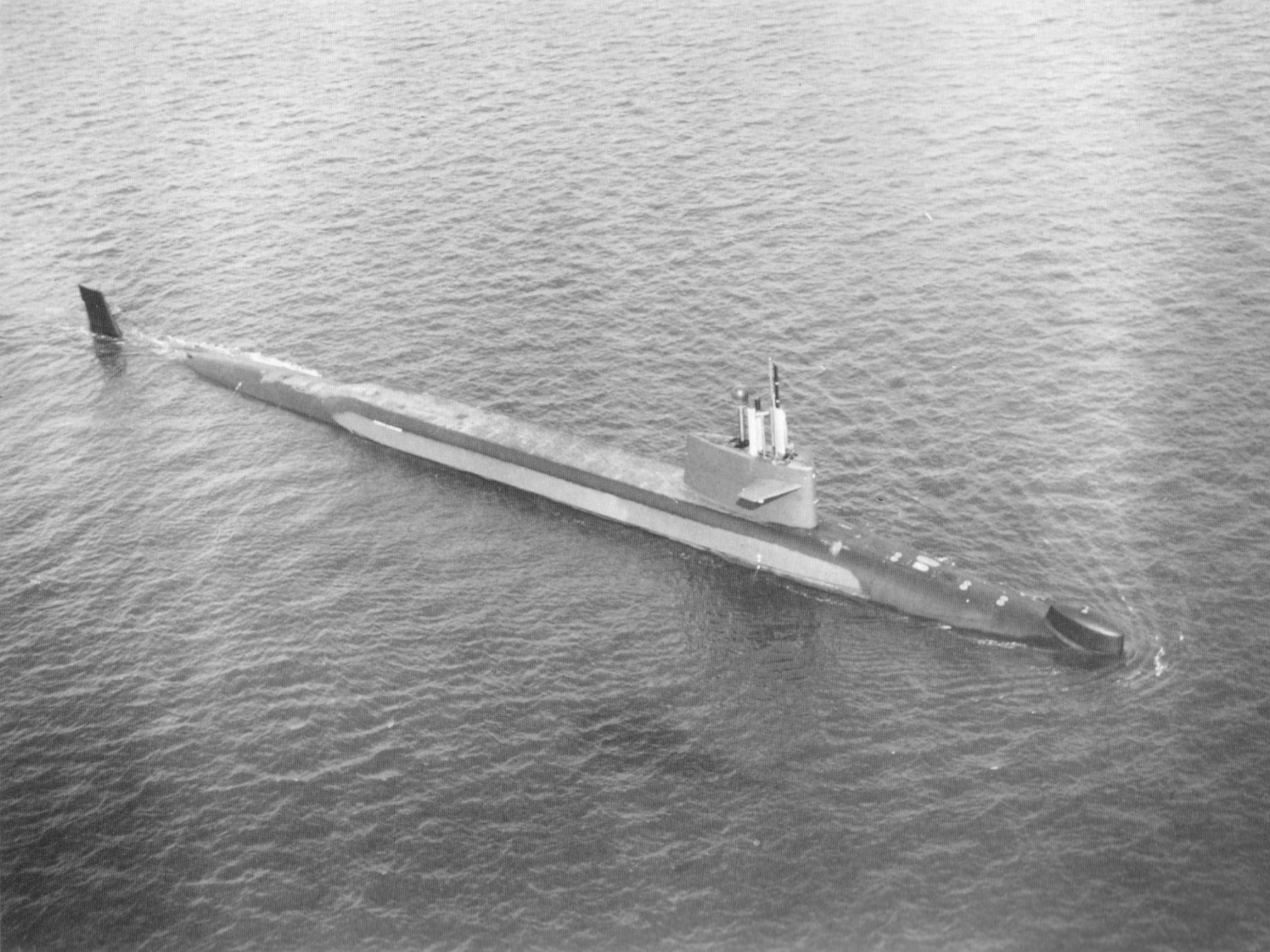
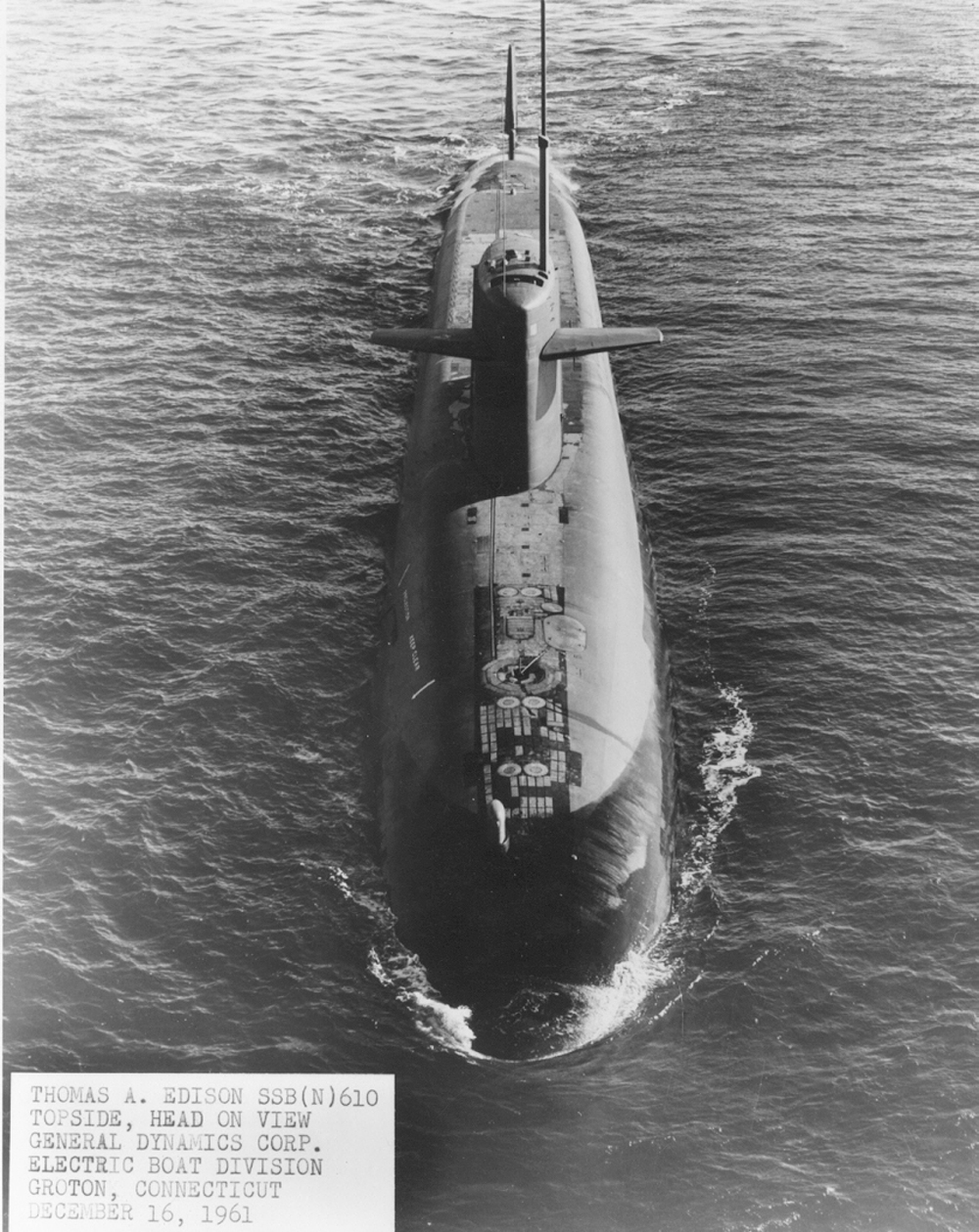
The fiberglass fairing on the top of the 608 class bow protected the upper, (there's another one on the keel) low freq hydrophone for the WLR-9 acoustic intercept receiver. The (much smaller) upper (high freq) hydrophone was on top of the sail. The WLR-9 processed and displayed information about any active sonar emissions including torpedo homing sonars. It used five different alarms to alert the sonar shack which b!tch was which, without having to even look at it. Reporting the results on the display was the job of the sonar sup under normal watch-standing conditions. During battle stations, it had a dedicated operator.
Nearly all US submarines (warfighters, anyway) had this Norden-built system when it came out and newer versions exist to this day.
The closest thing to a rear-looking passive sonar was an experiment conducted using a circular BQR-2 array mounted to the rear/upper end of the sail that wasn't worth much and didn't last long. With the introduction of towed arrays in the early 70's, (BQR-15 /STASS) an improved, long-range detection method for the area surrounding the ship became available, but for the baffles that was not enough because of the (very low) frequency coverage of the array. Towed arrays offer 360 coverage, not just behind the platform as is generally believed.
A bow-mounted sonar protected by a dome cannot "listen through" the ship. This is why the God of Acoustics created "The Baffles" which students were acquainted with during the first week of basic submarine sonar "A" school.
Submarines "clear baffles" at random intervals and prior to excursions to periscope depth by executing a (min 90 degree) turn and exposing their listening beams to the formerly obscured areas behind the ship with their passive sonars.
The older, main analog sonars, (BQR-2, BQR-4, BQR-7) could manually sweep their listening beams in azimuth using small handwheels, the operator used their ears and several indicators to determine when the listening beam was dead nuts-on the bearing with the highest noise level. Digital sonars like the BQR-21, BQQ-5, and BQQ-6 use digital processing to ultimately display information that automatically updates at different rates to present acoustic data. The fastest update rates (called integration time averaging) are the least accurate compared to longer update rates which smooth out the signal for a better target track. Multiple averaging rates are assigned on the consoles to provide the best overall acoustic picture.
If a noise level met detection criteria, an analog or digital tracker was assigned, and locked onto the contact, tracking it automatically. That data was made available to fire control for detailed contact tracking purposes and weapons employment if necessary. Other sensors like radar, ESM, and periscopes could provide data to refine the tracking solution, since sonar bearings can be several degrees off, depending on several factors.
During the Cold War, the Soviets had a nasty habit of reversing course to monitor their baffle area, since their sonars weren't as advanced and US boats held a commanding acoustic (radiated self-noise) advantage.
A high percentage of sonar information found online is erroneous, contradictory, and misleading. The words "hydrophones" and "transducers" are often used interchangeably, but they have completely different purposes.
CC
|


{kind=link}
{kind=link}
{kind=link}
{kind=link}